


Hello,KU 粉们,再过几天,国庆小长假就要来临啦,相信你们早就拿起小本本做好旅游攻略了吧!
别着急,在出发之前,小 KU 特意为你们准备了节前大礼 -「KUKA 微校」系列第九课!这节课我们将为 KU 粉们讲解 KUKA KR C4 控制柜标准输入输出模块是如何配置的,具体分下面 4 个步骤,快跟随小 KU,一起学起来吧!
1硬件准备 / Hardware
KUKA KR C4 控制器
BECKHOFF 耦合模块 EK1100( EtherCAT )
BECKHOFF 输入模块 EL1809(16 个点数字量 )
BECKHOFF 输出模块 EL2809(16 个点数字量 )
注:全文提到的 BECKHOFF 是 “倍福” 品牌。
2软件准备 / Software
与控制器相对应的 WorkVisual 软件 (随机光盘)
3硬件连接 / Connection
在软件模块配置之前,下面我们首先为大家介绍一下如何安装接线:

将 CCU 上的 X44 接入 EK1100 的 EtherCAT IN 口。
EK1100 的四个指示灯(图上绿色区域),上面的两个常亮,下面的 link 灯高频闪烁,RUN 灯常亮。
电源端的接线用小螺丝刀(一字或十字)插入方孔中,斜向下拨压,将导线插入圆孔中,再将小螺丝刀释放取出,导线被压牢。
注意:EK1100 上方的 24V / 0V 是给 EK1100 自身供电的,而下方的 + / - 是给后续模块的输入/输出端子供电的,都需要接线。

输入回路需要与电源正极连接,故传感器或开关的一端接 EL1809 上的 16 个端子任意一个,另一端接 EK1100 上的 + 。

输出回路需要与电源负极连接,故负载的一端接 EL2809 上的 16 个端子任意一个,另一端接 EK1100 上的 - 。
4软件配置 / Configuration
1. 导入模块设备说明文件(简称 ESI )文件
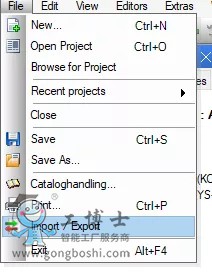
从 BECKHOFF 官网下载相关模块设备说明文件( ESI )。打开 WorkVisual 软件,菜单 File / import / Export / import device description file。
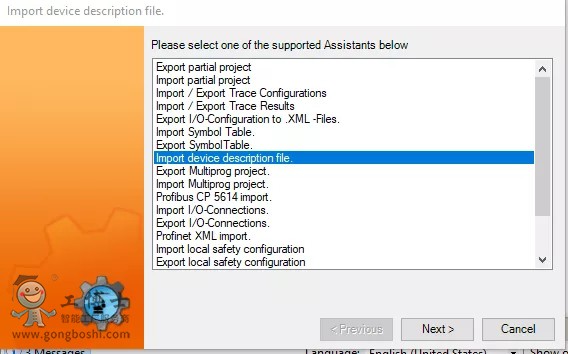
点击浏览,找到相关的 ESI 文件,导入后系统会自动更新设备目录。(必须将机器人项目关闭才能导入设备说明文件)

2. 组态配置
使用笔记本电脑将机器人项目上传至所使用的 WorkVisual 软件中,激活该项目,选择总线结构(Bus structure),点击鼠标右键,添加。


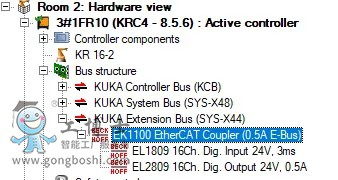
选择 KUKA Extension Bus,点击鼠标右键添加,将 EK1100 模块添加至KEB 总线上。

选择 EK1100 模块,点击鼠标右键添加,将 EL1809 和 EL2809 添加到 EK1100 下方。

3. 地址映射(I/O Mapping)
以输入信号为例:点击 IO Mapping 标签 ,左边选择 KRC I/Os ,点击Digital Inputs 右侧选择 Fieldbusses 标签,点击 EL1809 模块。

右边 Ctrl+A 全选,然后拖曳至左侧机器人起始输入端地址位,结果见下图。

输出的地址映射也是如此。
好啦,今天的课程就上到这里啦,有没有感觉浑身充满了智慧的力量,会学的 KU 粉们才更会玩噢!
在这里小 KU 提前祝大家国庆节快乐,别忘了美食需要你们去发现,美景需要你们去探索,要多出去走走噢!